Pimax Vision 8K X (Normal FOV, 75Hz)
Geometry
as recorded and displayed by hmdq or hmdv.
hmdv version 2.2.1 - displaying hmdq output data in no time
Time stamp: 2020-07-18 23:35:28
hmdq version: 2.0.1
Output version: 5
OS version: 10.0.18362.959
... Subsystem: OpenVR ...
OpenVR runtime version: 1.13.10
Recommended render target size: [3728, 3160]
Left eye HAM mesh:
original vertices: 120, triangles: 40
optimized vertices: 48, n-gons: 4
mesh area: 8.73 %
Left eye to head transformation matrix:
[[ 0.984808, 0. , 0.173648, -0.030015],
[ 0. , 1. , 0. , 0. ],
[-0.173648, 0. , 0.984808, 0. ]]
Left eye raw LRBT values:
left: -1.742203
right: 1.255990
bottom: -1.269841
top: 1.269841
Left eye raw FOV:
left: -60.14 deg
right: 51.47 deg
bottom: -51.78 deg
top: 51.78 deg
horiz.: 111.62 deg
vert.: 103.56 deg
Left eye head FOV:
left: -70.14 deg
right: 41.47 deg
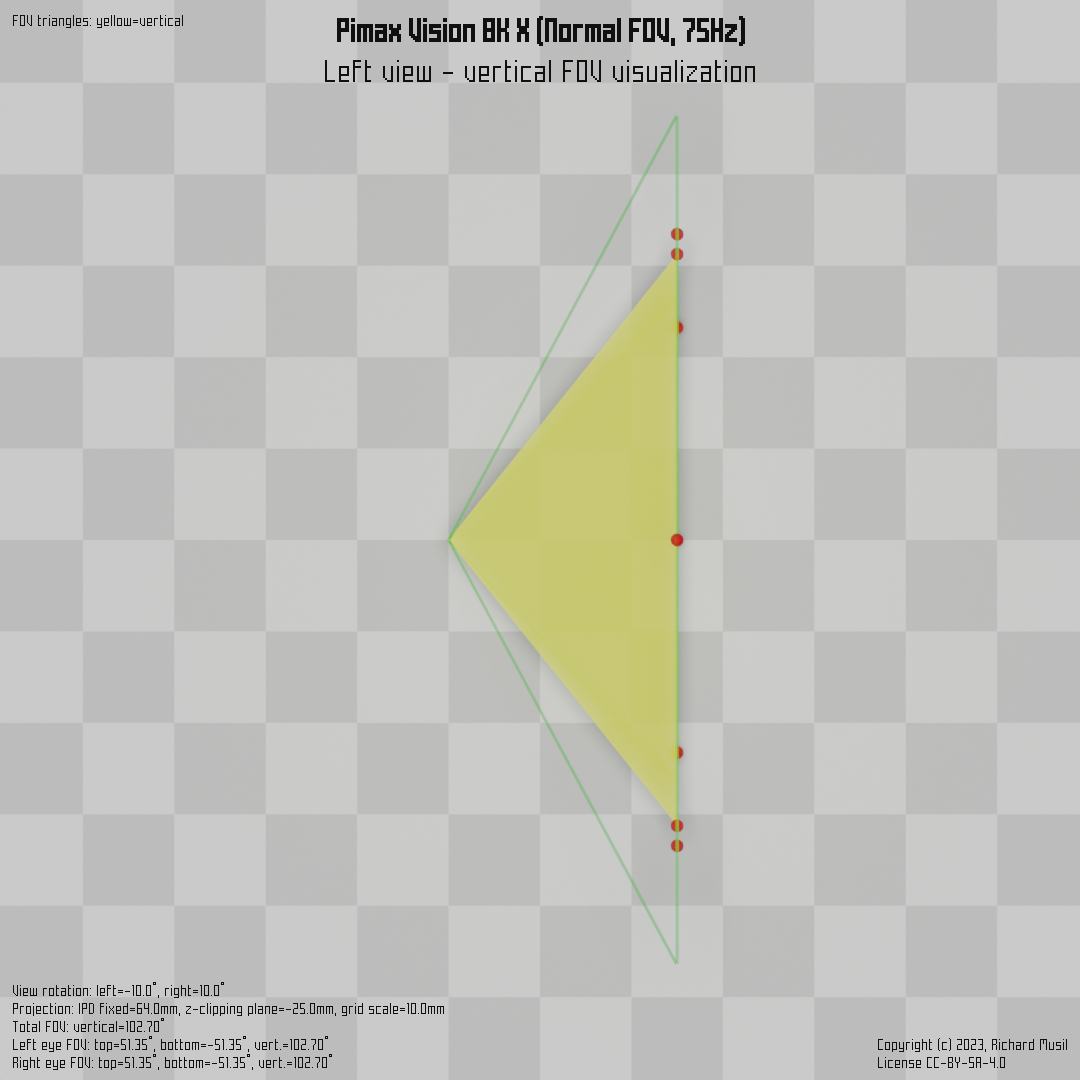
bottom: -51.35 deg
top: 51.35 deg
horiz.: 111.62 deg
vert.: 102.70 deg
Right eye HAM mesh:
original vertices: 120, triangles: 40
optimized vertices: 48, n-gons: 4
mesh area: 8.73 %
Right eye to head transformation matrix:
[[ 0.984808, -0. , -0.173648, 0.030015],
[ 0. , 1. , -0. , 0. ],
[ 0.173648, 0. , 0.984808, 0. ]]
Right eye raw LRBT values:
left: -1.255990
right: 1.742203
bottom: -1.269841
top: 1.269841
Right eye raw FOV:
left: -51.47 deg
right: 60.14 deg
bottom: -51.78 deg
top: 51.78 deg
horiz.: 111.62 deg
vert.: 103.56 deg
Right eye head FOV:
left: -41.47 deg
right: 70.14 deg
bottom: -51.35 deg
top: 51.35 deg
horiz.: 111.62 deg
vert.: 102.70 deg
Total FOV:
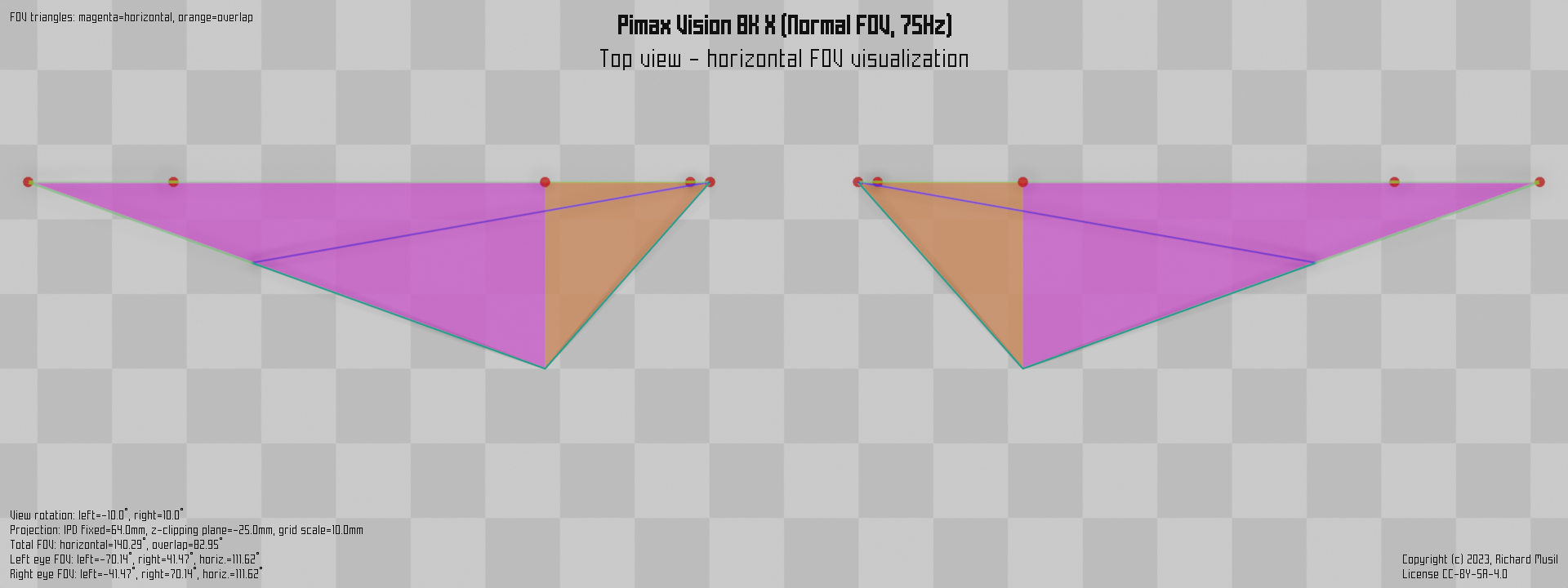
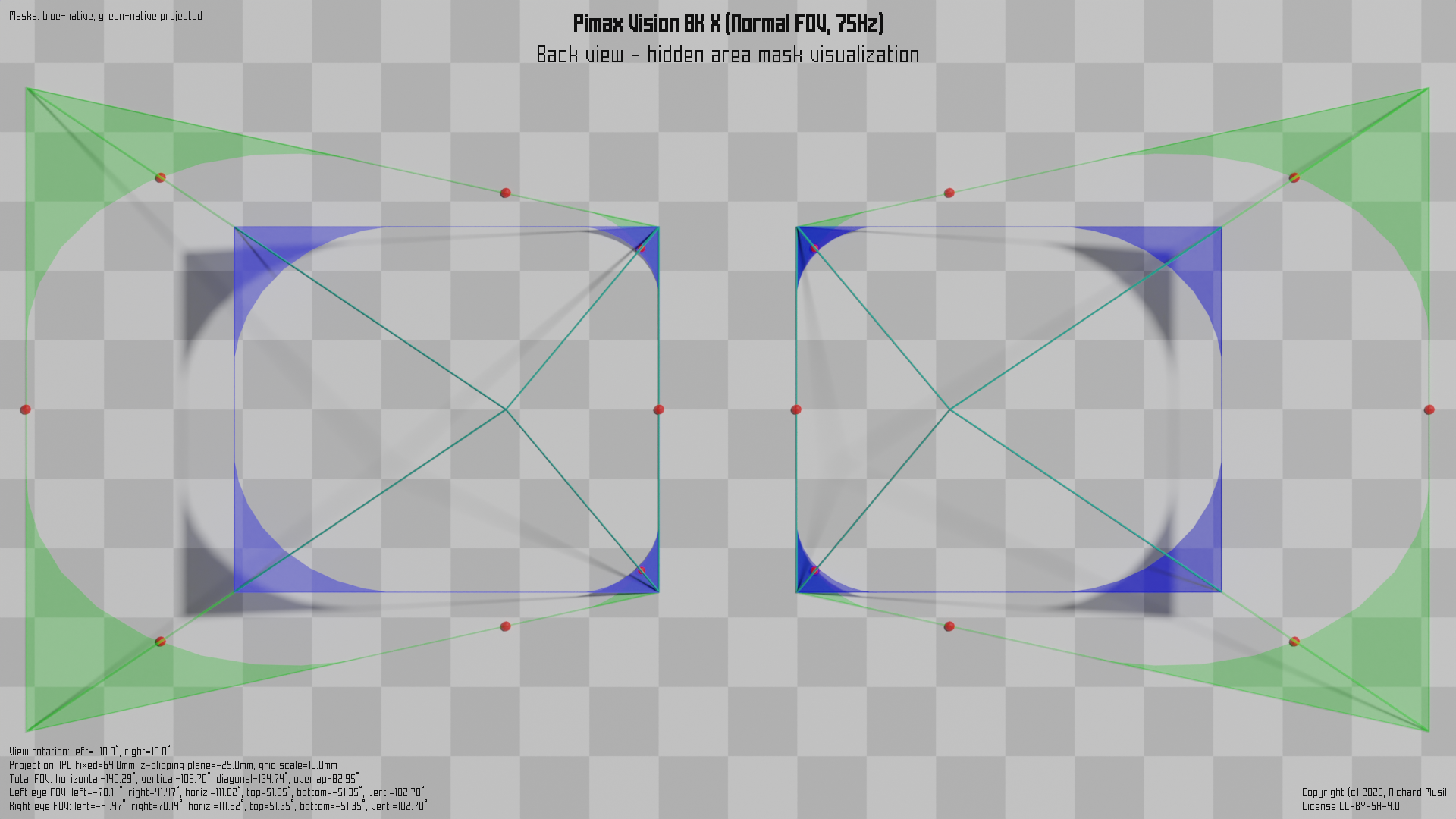
horizontal: 140.29 deg
vertical: 102.70 deg
diagonal: 134.74 deg
overlap: 82.95 deg
View geometry:
left view rotation: -10.0 deg
right view rotation: 10.0 deg
reported IPD: 60.0 mm
Recorded and contributed by generic.
Rendered FOV visualizations
Following images show different views of a rendered FOV visualization of a particular model in a particular configuration (if there are more available). The images are rendered to the same scale (when possible) to make them easier to compare. The top, left, and back views are rendered with an orthographic projection to preserve the visual size over the different renders. The overall view (full) uses the perspective projection. Each image is marked with the information describing the headset configuration and the other aspects of the image.
Visualization rules
-
Headsets which define the hidden area mask (HAM) are rendered with it. The HAM also impacts the calculated FOV points (the red “clown noses” spread around the edge of the HAM or the viewing frame).
-
Headsets without the HAM have the view rendered with the wireframe only, which visualizes the tip of the viewing frustum.
-
The FOV points and the subsequent FOV triangles are calculated and visualized according to these rules.
-
Viewing frustums are clipped by the z-clipping plane at the same fixed distance, so the projected areas on the chequerboard in back and full views are on the same scale and directly comparable between different configurations or headsets.
-
For the same reason the interpupillary distance (IPD) is fixed at the same value for all headsets.
-
Headsets which use canted views and can operate in both modes (native and parallel) are rendered with a green HAM projection, which shows the shape of the native HAM (rendered in blue) projected to the “normalized” (checkerboard) plane parallel to the face. Those green native projections are then directly comparable either to the parallel mode HAMs (rendered in red) of the same model, or to the native HAMs of the other (traditional) headsets which use only the parallel views by design and as such are also rendered into the parallel (checkerboard) plane.
Top view
Left view
Back view
Full view
